spidriver¶
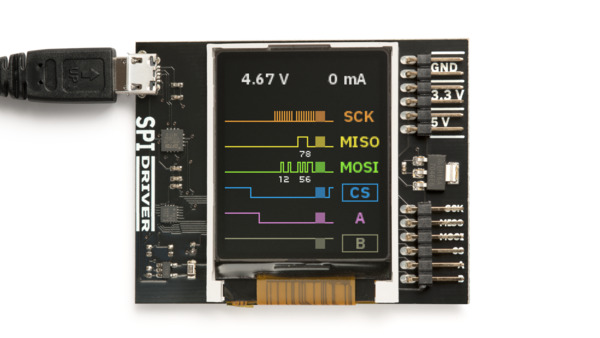
SPIDriver is an easy-to-use, open source tool for controlling SPI devices over USB. It works with Windows, Mac, and Linux, and has a built-in color screen that shows a live “dashboard” of all the SPI activity.
The SPIDriver User Guide has complete information on the hardware:
System Requirements¶
Because it is a pure Python module, spidriver can run on any system supported by pyserial.
This includes:
Windows 7 or 10
Mac OS
Linux, including all Ubuntu distributions
Both Python 2.7 and 3.x are supported.
Quick start¶
To connect to an SPI flash and read its JEDEC id:
>>> from spidriver import SPIDriver
>>> s = SPIDriver("/dev/ttyUSB0") # change for your port
>>> s.sel() # start command
>>> s.write([0x9f]) # command 9F is READ JEDEC ID
>>> list(s.read(3)) # read next 3 bytes
[239, 64, 24]
>>> s.unsel() # end command
The User Guide at https://spidriver.com/spidriver.pdf has more examples, as does the SPIDriver repo on github.
Module Contents¶
-
class
spidriver.SPIDriver(port='/dev/ttyUSB0')¶ SPIDriver interface.
- Parameters
port (str) – The USB port to connect to
After connection, the following object variables reflect the current values of the SPIDriver. They are updated by calling
getstatus().- Variables
product – product code e.g. ‘spidriver1’ or ‘spidriver2’
serial – serial string of SPIDriver
uptime – time since SPIDriver boot, in seconds
voltage – USB voltage, in V
current – current used by attached device, in mA
temp – temperature, in degrees C
cs – state of CS pin
a – state of A pin
b – state of B pin
ccitt_crc – CCITT-16 CRC of all transmitted and received bytes
-
detach()¶ Detach all signals, leaving them all to float.
-
sel()¶ Select the SPI device by asserting CS
-
unsel()¶ Unselect the SPI device by deasserting CS
-
read(l)¶ Read l bytes from the SPI device
- Parameters
l (int) – number of bytes to read
- Return bytes
received bytes, length
l
-
writeread(bb)¶ Write bytes to the SPI device, return the read bytes
- Parameters
bb (bytes) – bytes to write to the SPI device
- Return bytes
received bytes, same length as
bb
-
seta(v)¶ Set the A signal to 0 or 1
-
setb(v)¶ Set the B signal to 0 or 1
-
getstatus()¶ Update all status variables